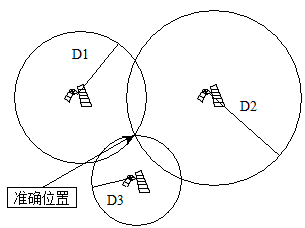
全球定位系统 (GPS, Global PositioningSystem)是利用人造地球卫星进行点位测量导航技术的一种, 其它的卫星定位导航系统有俄罗斯的GLONASS,欧洲空间局的NAVSAT, 国际移动卫星组织的INMARSAT等等。 GPS全称是NAVSTAR(NAVigationSatellite Timing AndRanging)/GPS,由美国军方组织研制建立, 从1973年开始实施,到九十年代初完成。 GPS系统包括三大部分:空间部分——GPS卫星星座;地面控制部分——地面监控系统;用户设备部分——GPS信号接收机。 GPS由21颗工作卫星和3颗备用卫星组成,它们均匀分布在六个相互夹角为60度的轨道平面内,即每个轨道上有四颗卫星。 卫星高度离地面约20000公里,绕地球运行一周的时间是12恒星时,即一天绕地球两周。 GPS卫星用L波段两种频率的无线电波(1575.42MHz和1227.6MHz)向用户发射导航定位信号, 同时接收地面发送的导航电文以及调度命令。 对于导航定位而言,GPS卫星是一动态已知点, 而卫星的位置是依据卫星发射的星历——描述卫星运动及其轨道的参数——计算得到的。 每颗GPS卫星播发的星历是由地面监控系统提供的,同时卫星设备的工作监测以及卫星轨道的控制, 都由地面控制系统完成。 GPS卫星的地面控制站系统包括位于美国科罗拉多的主控站以及分布全球的三个注入站和五个监测站组成,实现对GPS卫星运行的监控。 GPS信号接收机(图12-6)的任务是,捕获GPS卫星发射的信号, 并进行处理,根据信号到达接收机的时间,确定接收机到卫星的距离。 如果计算出四颗或者更多卫星到接收机的距离,再参照卫星的位置,就可以确定出接收机在三维空间中的位置。 图 12.6 GARMIN手持式GPS接收机 # GPS定位基本原理是利用测距交会确定点位。 如图12-7所示,一颗卫星信号传播到接收机的时间只能决定该卫星到接收机的距离, 但并不能确定接收机相对于卫星的方向,在三维空间中,GPS接收机的可能位置构成一个球面; 当测到两颗卫星的距离时,接收机的可能位置被确定于两个球面相交构成的圆上; 当得到第三颗卫星的距离后,球面与圆相交得到两个可能的点; 第四颗卫星用于确定接收机的准确位置。 因此,如果接收机能够得到四颗GPS卫星的信号,就可以进行定位; 当接收到信号的卫星数目多于四个时,可以优选四颗卫星计算位置。 图 12.7 测距交会定位示意图 # 造成GPS定位误差的因素有很多, 如由于卫星轨道变化以及卫星电子钟不准确以及定位信号穿越电离层和地表对流层时速度的变化等引起的误差, 但是GPS定位中最为严重的误差则是由于美国军方人为降低信号质量造成的,这种误差可高达100米。 美国为了防止未经许可的用户把GPS用于军事目的,实施了各种技术。 首先GPS卫星发射的无线电信号包括两种不同的测距码,即P码(也称精码)和C/A码(也称粗码), 相应两种测距码GPS提供两种定位服务方式,即精密定位服务(PPS)和标准定位服务(SPS), 前者的服务对象主要是美国军事部门和其它特许部门,后者则服务于广大民间用户。 此外,通过使用SA(Selective Availability,选择可用性)技术, C/A码的定位精度从20米降低至100米 ; 而AS(Anti-spoofing,反电子欺骗)技术用于对P码进行加密,当实施AS时, 非特许用户不能得到P码。 上述的人为误差给GPS的民用造成了障碍,但是可以通过差分纠正来消除。 差分纠正是通过两个或者更多的GPS接收机完成的,其方法是在某一已知位置, 安置一台接收机作为基准站接收卫星信号,然后在其它位置用另一台接收机接收信号, 由前者可以确定卫星信号中包含的人为干扰信号,而在后者接收到的信号中减去这些干扰, 即可以大大降低GPS的定位误差。 12.2.1. GPS系统介绍 #
GPS卫星及其星座 #
地面控制系统 #
GPS信号接收机 #

12.2.2. GPS定位基本原理 #
12.2.3. GPS误差和纠正 #