对地理对象的抽象过程通常认为有9个层次[OGC ],在这九个层次之间通过8个接口与它们连接, 定义了从现实世界到地理要素集合世界的转换模型。 这9个层次依次为( 图 2.7 ):
现实世界(RealWorld)
概念世界(Conceptual World)
地理空间世界(GeospatialWorld)
尺度世界(Dimensional World)
项目世界(ProjectWorld)
点世界(Points World)
几何体世界(GeometryWorld)
地理要素世界(Feature World)
要素集合世界(FeatureCollectionWorld)
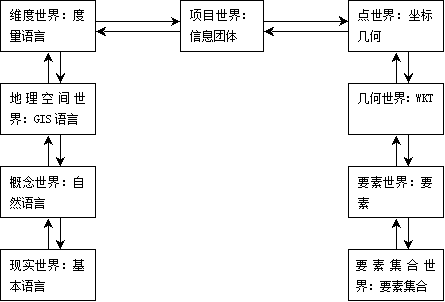
图 2.7 OpenGIS的九层模型 #
连接它们的8个接口分别为:
认识(Epistemic)接口、
GIS学科(GISDiscipline)接口、
局部测度(LocalMetric)接口、
信息团体(Community)接口、
空间参照系(SpatialReference)接口、
几何体结构接口、
要素结构接口
项目结构接口
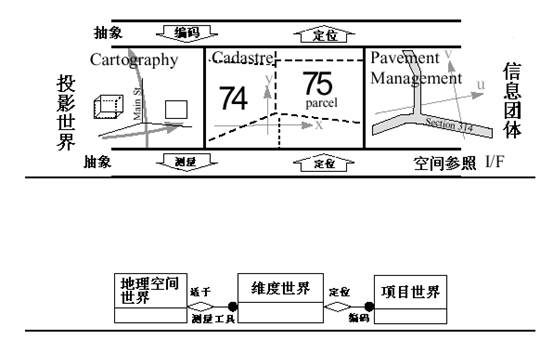
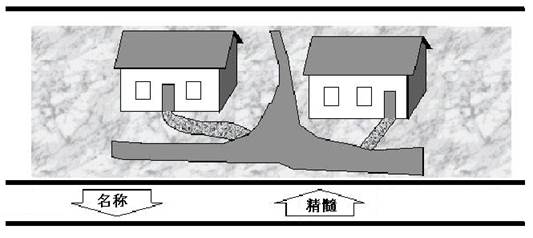
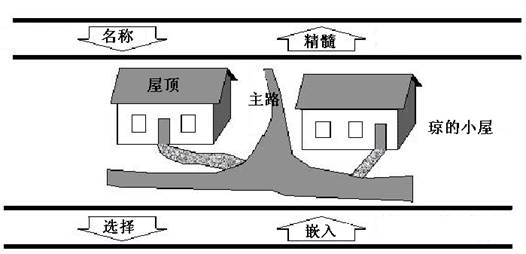
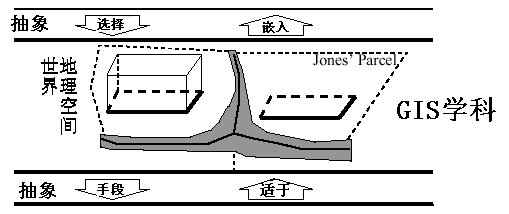
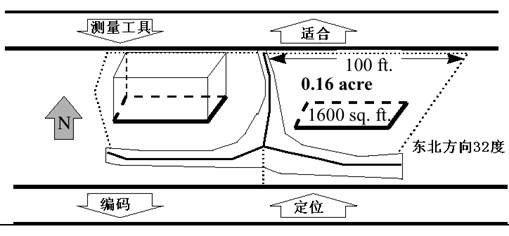
其中前五个模型是对现实世界的抽象,并不在计算机软件中被实现; 后四个模型是关于真实世界的数学的和符号化的模型,将在软件中被实现 [ 1 ] 。 现实世界是所有事物(Fact)的集合,无论人们是否知道这些事物。 根据事物的本质,人们可以认识理解现实世界中的事物。 图 2.8 表示了人类生活于其中的现实世界。 象云一样的纹理结构占据了图形的绝大部分,代表了人们所不了解的事物,而且它们造成了宇宙的混沌状态。 人们只知道一些所熟悉的事实,其中的一些被绘制在图中。 图 2.8 现实世界 # 概念世界是人类自然语言的世界,人类了解且认识其所命名的事物,因此这些事物构成了“语言的世界”。 在 图 2.9 的概念世界中,表示宇宙混沌状态的云并不存在,因为这些在自然语言内容中通常是不可见的。 示意图显示了容易识别的事物:门、路、砖、屋顶、房屋等。 用这种方法,可以返回到真实的世界中,抽象出一个事实的本质,称之为精髓(Pith)。 由于可以给出所知道的事物的名字,而且能够感受到这些相同的已知事物的本质, 所以称真实世界与概念世界之间的交互为认识接口(Epistemic Interface)。 图 2.9 概念世界 # 对于GIS来讲,自然语言的概念世界并不是充分抽象的, 在GIS中只有概念世界中一个简化的子集才是兴趣所在。 这个子集叫做地理空间世界,人们与概念世界的交互的方法叫选择。 图 2.10 中,有三种实体类型。 每个由一个矩形表示,并且每个用其上部的名字所表示。 图 2.10 现实世界与地理空间世界的联系 # 矩形之间的线代表着实体之间的联系,每条线在末端带有一个作用名以解释这种联系。 菱形代表聚合(Aggregation),例如,概念世界的存在依赖于真实世界的存在。 实心圆意味着在联系的那个末端存在着一个集合(并不是一个单个的对象),例如,每个概念世界嵌入(Embed)一系列不同的地理空间世界。 从事GIS的技术人员都习惯于把世界看作一个抽象的、几乎是具有卡通特性的世界。 这是由于在概念层次的世界充满了复杂的形状、样式、细节。 这些复杂性在地理空间世界中被消除,并用简单的、浅显的抽象来代替, 这些抽象通常在时间以及空间上都是静态的。 通过地理空间世界的抽象,河流是被看作线,地形被看作等高线多边形的简化,而森林被看作多边形。 前面描述的概念世界在 图 2.11 中以卡通的方式在地理空间世界水平上被重画。 图 2.11 是以透视的方式绘制的,但是地理空间世界通常是从一个“顶点”来观察,即垂直地从上向下看。 注意在图中,一些特征已经消失,另外一些已经变得大大简化。 图 2.11 地理空间世界 # 例如,一些窗户、墙、建筑物的房顶已经消失。 这是由于它们并不是GIS世界视点的兴趣所在。 它们已经成为GIS意识中所不可见的。 当然,并不存在一个通用的定义——准确地讲,什么样的特征对于一个GIS技术人员来讲是其兴趣所在, 也许有时一个屋顶可能会引起兴趣。 卡通仅仅表明地理空间世界是概念世界中的一个子集和一个简化,在地理空间世界中所讲的语言是GIS学科语言。 在图中,房屋的地基还保持着,尽管在概念世界中,部分地基被隐藏在其它要素后面。 从GIS的观点来看,一个建筑物的所有的地基都是可见的——尽管有些是看不见的。 每个GIS实现都有特定的规则, 这些规则规定了在地理空间世界中什么样的特征被识别以及它们是如何从概念世界中被简化的。 例如,一个规则可以把一个砖房简化为一个三维的多面体; 然而具有另一种表面物质的一个房屋被简化为它的地基多边形。 简单地讲,在概念世界中不可见的事物在地理空间世界中就变得可见了,因为这些事物在GIS中是特殊兴趣所在。 概念世界和地理空间世界之间的交互称为GIS学科接口;从概念空间进行的交互方法叫做选择。 为了转换从地理空间到概念世界的这种交互,人们可以采用嵌入(Embed)方法, 这种方法把GIS感兴趣的内容放置在概念世界适当的语境(Context)中。 在地理空间世界中所认识的要素通常有一个自然的维度: 0、1、2或者3,这取决于它们是否被看成点、线、面、体。 此外,根据二元拓扑关系(如包含、相邻或分开),它们还具有另外的量度。 下一个层次的抽象识别了要素固有的维度和尺度(DimensionalityandMetrics)特性, 因此叫做维度世界,可以通过在欧氏空间中进行工具测量获取要素的尺度。 维度世界是地理空间世界的一个抽象,其中包括一些测量工具,如卷尺测量和指南针, 在这样的水平上所认识到的事实包括一元(Unary)关系(如一个弧段的长度)和二元(Binary)关系(如两点之间的距离), 这些关系本身就是各种要素的抽象。 维度世界与地理空间世界的接口叫做适合(Fit)。 两个电话线路杆之间的距离是属于维度世界。 这个长度线适合于地理空间世界中所见到的长度跨度,在 图 2.12 中包括了在维度空间所表现的一些抽象。 图 2.12 维度世界 # 维度世界是现实世界抽象的最后一个。 下一个抽象叫做一个项目世界,该世界只发生在一个具体的实现中, 每一个实现都是针对一个特殊的GIS学科或分学科。 在每一个实际的实现中,只有维度世界中的一个子集得到识别。 通常这个子集是由研究区域的范围和被测量的特定的现象所决定的。 在项目世界的层次中,空间参照系统(Spatial ReferenceSystem)的概念被引入, 最常见的参照系统是环绕地球表面建立的坐标系统(经纬度); 此外,还有其它的间接的参照系统, 例如线性参照系统可以用一个参数标识出一条线(如高速公路)上的一个点位。 无论采用哪种坐标参照系统,都可以确定维度世界中的要素的每个“角点”的坐标。 维度世界和项目世界之间的接口称为信息团体接口,从维度世界调用该接口的方法叫做编码(Codify), 其结果是每个“角点”的坐标以一组数值表示; 相反的,从项目世界调用的方法称为定位,它确定了每个要素与其他要素的相对关系。 有两种常用的方法来对地理空间要素建模。 第一个模型定义了点、线、多边形的一个要素的空间范围, 以及来自于所熟知的一系列类型的几何基本单元(Primitive), 在这种方式下的要素叫做“几何体要素(Featureswith Geometry)”。 第二种称为覆盖(Coverage),影像是该模型的一个特殊的例子。 几何体要素和覆盖是紧密相关的,但是在概念上截然不同。 要素模型用于对现实世界中的地物对象建模,如道路、城市等等; 而覆盖模型则对现象建模,包括:温度、土壤分布等等。 一个要素具有多种属性,如空间位置属性,空间关系属性,描述属性,时间属性等等, 覆盖也可以视为要素的一种属性。 GIS并不只是一个学科,它还是地理空间信息表现的一门语言,其中这些信息源于许多与地理学科相关的学科,如森林管理、土壤制图、运输模型、地籍管理等等,这些学科中的每一门学科都有许多子学科,一个GIS项目可以包含任何这些学科的组合。 正是项目世界语言的多样性导致了GIS信息存储之间相交互的最复杂的问题。 这是人为造成地理空间世界分割的原因。 但是,如果对语言结构进行充分地统一化,这种情况是可以管理的。 地理信息团体是指共享数据的用户群,他们属于不同的专业领域,可以是数据使用者,也可以是数据提供者。 地理信息团体将整个地理空间世界中的一个特殊的子集看成是一个抽象。 在三个不同的应用中,上述的例子被抽象为三个不同的项目世界模型。 它们显示在图2-14中,分别反映了一个制图员、一个地籍管理人员和一个道路管理人员视角的项目世界。 图 2.13 项目世界 # 2.2.1. 现实世界 #
2.2.2. 概念世界 #

2.2.3. 地理空间世界(Geospatial World) #
2.2.4. 维度世界(Dimensionality World) #
2.2.5. 项目世界(Project World) #