未来遥感技术- 无人机(UAV)
访问量: 357 次浏览

无人机正在彻底改变遥感和 GIS 应用。 例如,农民可以使用无人机收集完整田地的景象, 以深入了解作物状况, 无人机机器的显著优势在于, 与传统的步行测量相比, 通过 GPS(全球定位系统)等方法可以更快、更容易, 价格更便宜地完成这项工作。 无人机图像的空间信息可以帮助更好地决定何时何地改进所需的目标表面。 在航空术语中, 它被称为 RPAS(远程驾驶航空系统)。
众所周知,农业正面临着重大的问题。 到 2050 年,全球人口预计将达到 97 亿。 农业产量必须扩大才能养活所有这些人。 同时,必须降低农业对环境的影响。 这需要适当使用土壤和水资源以及维护森林覆盖和生物多样性。 无人机被视为支持下一代农业的解决方案之一。
无人机的主要部件

上图显示为无人机系统的主要组成部分:无人机、遥控器、地面控制站(平板电脑)和无人机电池。
无人机平台、遥控器和地面控制站
无人机系统的主要组件是无人机平台、GPS 和遥控器, 经常添加地面控制站。 这是一台计算机、笔记本电脑或平板电脑, 可显示无人机状态信息、飞行区域地图以及飞行过程中拍摄的实时照片。
电池
用于无人机 (UAV) 的主要电池类型是锂聚合物。 这种类型的可充电电池可以提供所需的高放电功率来为电机供电, 并且重量相对较轻。 不过这类电池需要注意, 过度充电、过热、短路和物理损坏可能会导致一系列灾难性的故障, 包括膨胀或破裂包装、电解液泄漏和火灾等。 因此,安全的充电、储存和运输程序非常重要。

上图显示用于无人机飞行不同类型的锂聚合物电池。
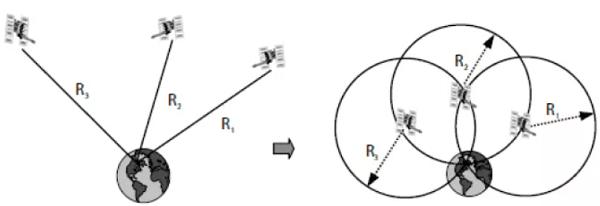
全球定位系统 (GPS)
大多数无人机系统都包含全球定位系统 (GPS) 组件。 GPS,也称为 GNSS(全球导航卫星系统), 允许用户定位无人机。 无人机飞行时, GPS 数据用于构建飞行记录, 其中存储飞行坐标。 此外,该位置数据用于在地面控制站显示的地图上实时跟踪无人机。
Note:什么是正交马赛克图像, 简单来说, 正交马赛克图像是一组拼接在一起的图像, 就像拍摄一张具有地面精确 2D 表示的风景照片一样。
如何应用无人机遥感
当我们讨论不同形式的遥感时, 说明已对遥感的工作原理有了基本的了解。 在本文的这一部分, 将学习在规划无人机飞行计划时可能使用的不同类型的分辨率。 以下是遥感系统和无人机中使用的主要分辨率类型:
空间分辨率
首先,重要的分辨率是指无人机获取的图像在地面上一个像素的大小。 下图突出显示了地面的不同空间分辨率图像, 以便更好地理解它。 简单来说, 像素的尺寸越小,图像中的细节就越多。 与右侧所示的图像相比, 右侧呈现的图像具有较高的空间分辨率。

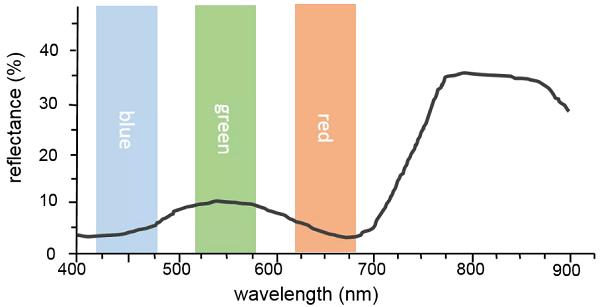
光谱分辨率
它区分了不同范围的 EMR(电磁辐射)(微波遥感的概念、几何及其应用), 并描述了相机测量的光谱波段数量以及这些波段所在的波长。 RGB 相机就是一个众所周知的例子。 该相机测量可见 EMS 光谱范围内的三个光谱带, 如下图所示:红色、绿色和蓝色。 多光谱相机测量多个波段并覆盖近红外波段。
时间分辨率
它表示收集同一区域或字段图片的频率。 更频繁地拍摄照片时, 可以更详细地注意到整个时间的变化。 干旱会影响农业区, 例如,在一段时间没有降雨后植物会变干。
遥感应用中的无人机类型
可以区分两种主要类型的无人机:
多旋翼无人机
基于多旋翼的无人机看起来更像直升机, 但具有多个旋翼。 在这种情况下, 无人机运动的控制是通过改变每个旋翼的相对速度来实现的。 多旋翼无人机由不同数量的旋翼构成。 常见类型是三轴飞行器、四轴飞行器、六轴飞行器和八轴飞行器, 指的是具有 3、4、6 和 8 个转子的系统。
固定翼无人机
固定翼无人机外形看起来像飞机, 可以通过其刚性机翼来识别。 由于这种刚性机翼, 它们无法进行垂直升降。 相反,它们会滑翔到更高的高度。

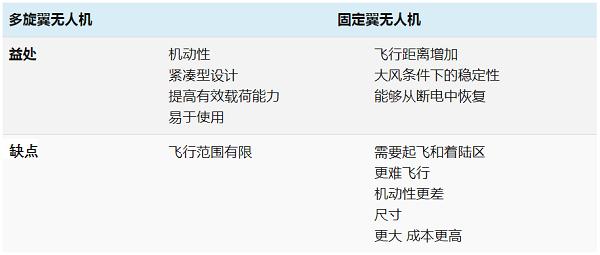
下表显示无人机类型优劣对比情况。
无人机传感器和摄像头
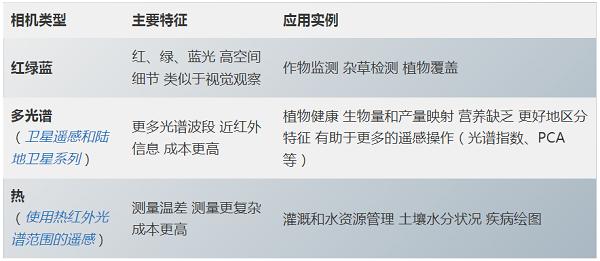
在无人机技术发展的潮流中, 无人机专用相机和传感器的可用性正在迅速变化。 为了适应无人机, 相机变得越来越小、越来越轻。 但是在农业中的应用也刺激了特定相机的大规模生产, 例如用于识别农作物的压力。 在这里,我们简要概述了不同的相机类型及其潜在应用。

下表列出了用于农业应用的主要相机类型。
此外,正在研究专用无人机相机的潜力。 例如,高光谱(https://geolearn.in/what-is-hyperspectral-remote-sensing/)相机拍摄的图片具有极其精细的光谱信息, 可用于识别疾病等。 另一种被称为激光雷达(LiDAR)的相机通过使用激光发出的光波来测量 3D 信息, 这可用于通过测量目标区域中对象的 3D 结构来确定要收集的任何对象的数量。
传感器
除了相机, 传感器(无人机)也可用于空气或水中粒子的点测量。 这些化学传感器用于测量敏感的一系列物质浓度。 传感器位于无人机下方, 通过在周围飞行定期采集样本。 根据该浓度,可以导出地图, 可能的应用是测量乙烯作为水果成熟度的指标或确定灌溉盆地的水质。

上图显示无人机下的化学传感器示例。
无人机遥感应用
若干年前, 卫星图像还是观察农田作物生长的主要工具。 一些卫星系统, 例如 Sentinel-2 或 Landsat 经常被使用, 并且已经开发了特定于作物的监测应用程序。 卫星的一个重要优点是可以定期覆盖整个地球。
无人机的日益普及提供了一种灵活的选择。 作为无人机用户, 可以决定数据采集的时间。 但也可以根据目标应用程序所需的信息, 选择不同的摄像头和传感器连接到无人机上。
- 实时监控
- 消防监控
- 作物生长监测
- 有助于精准农业
- 产量估算
- 灾害管理任务
- 高细节 3D 地形建模
- 城市规划
- 交通规划
在野外驾驶无人机的规则和条例
如今我们可以看到无人机的数量增长非常快。 无人机被商业公司、研究等机构使用, 因此出于安全原因, 为无人机 (UAV) 飞行制定一些规则和规定非常重要, 无人机飞行员在空中驾驶无人机时可以记住以下四大规定:
- 无人机在目标区域的飞行高度是多少;
- 飞行时请注意可以看到无人机的飞行高度,这个高度被称为视线;
- 未经允许不得在机场附近飞行,这会造成严重的问题;
- 仔细检查所在国家、地区的无人机使用法律;
无人机飞行规划的主要组成部分
- 无人机飞行计划的第一步也是最重要的一步是准备飞行计划;
- 检查目标区域可用的数字或模拟地图;
- 尽早确定可能对无人机造成损坏的潜在危险物体,如山丘、高楼等;
- 起飞前查看天气预报;
- 检查电池状态;
- 计算完成飞行需要多少时间;
- 评估场地需要的侧圈和尾圈;
- 目标区域等需要什么类型的无人机;
起飞前
- 实地查看实际情况;
- 确定起飞和降落区域;
- 紧急降落区;
飞行过程中
- 在飞行过程中检查无人机和摄像头系统,以及地面站的数据;
- 检查地面和空中的情况.
本文链接 :未来遥感技术- 无人机(UAV)