如何在 ArcGIS 中构建空间回归模型
访问量: 407 次浏览

ArcGIS中的空间回归分析
回归模型中的一些术语:
- 因变量(Y):想预测什么?
- 自变量(X):解释因变量。
- Beta 系数:反映解释变量和因变量之间关系的权重。
- 残差(Residual):模型未解释的值
回归公式:
y = β0 + (β1 × x1 ) + (β2 × x2 ) + … + (βn × xn ) + ε
ArcGIS 中的空间回归分析
让我们通过构建栖息地适宜性指数 (HSI),
也称为资源选择函数 (RSF)来实施 ArcGIS 回归工具。
利用308个沼泽鹿的 GPS 定位数据,
研究沼泽鹿与景观的关系。
需要注意的是:这是一个带有虚构数据的假设场景。
需要我们回答的问题如下:
- 沼泽鹿选择或回避哪些资源?
- 有哪些因素对沼泽鹿的位置有影响?
生境适宜性指数(HSI)
生境适宜性指数:HSI 是一个数值指数,
代表特定生境对选定物种的支持能力。
为什么要创建 HSI?
土地资源经理使用 HSI 来对景观做出更好的决策。
如果 HSI 显示沼泽鹿更喜欢湿地栖息地类型,
土地资源管理者则可以保护这些类型的栖息地。
土地资源管理者可以禁止基础设施的开发,
因 HSI 显示了特定栖息地支持沼泽鹿的能力。
我们可以外推 HSI 来预测其他地区的沼泽鹿。
解释变量
沼泽鹿的解释变量是什么?
这可能是回归建模最困难的部分。
我们需要调查沼泽鹿的潜在栖息地类型。
这就是专家建议派上用场之处。
以下是研究的发现:

沼泽鹿生活在漫滩、草原和潮湿森林等沼泽栖息地,
它们更喜欢有大量覆盖物作为保护的区域,
例如芦苇床或草丛较高的地方。
该物种主要分布在靠近永久水源的地方。
根据文献,沼泽鹿选择自然植被和水域。
但是有没有什么地貌特征可能会扰乱沼泽鹿呢?
或许可用空间回归分析来探索这些自变量。
自变量和因变量
我们研究区域的特点是自然植被和开阔水域。
一条道路穿过单元格 A6-F6,
这可能会造成潜在的干扰。
露营地也存在于单元格 B3、C7 和 D7 中。
沼泽鹿的分布和露营地
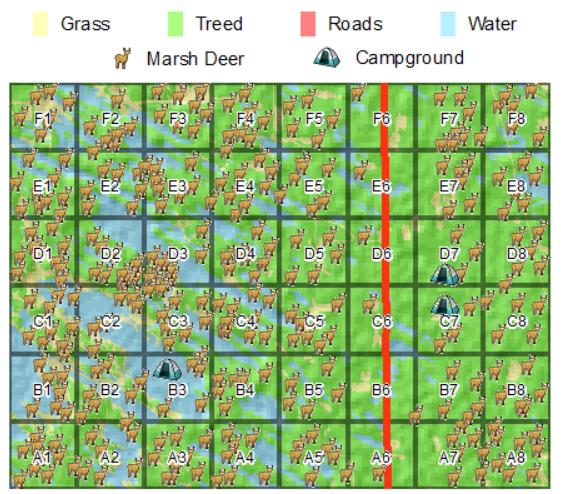
每个点代表沼泽鹿的 GPS 位置。
从视觉上看,
道路和露营地附近的沼泽鹿似乎更少了。
另一个观察结果是沼泽鹿在存在湿地的单元格 D2 和 D3 中显得更密集。
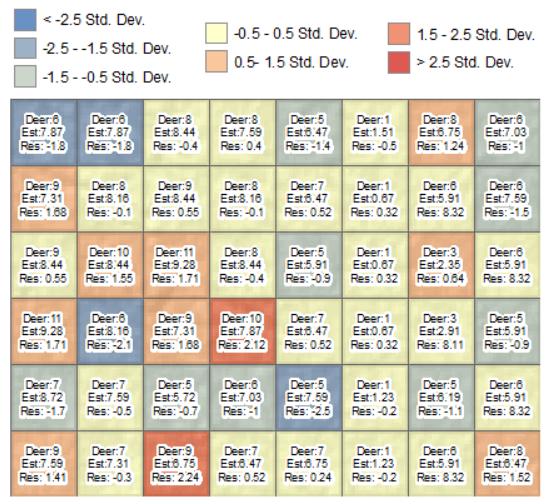
热点分析
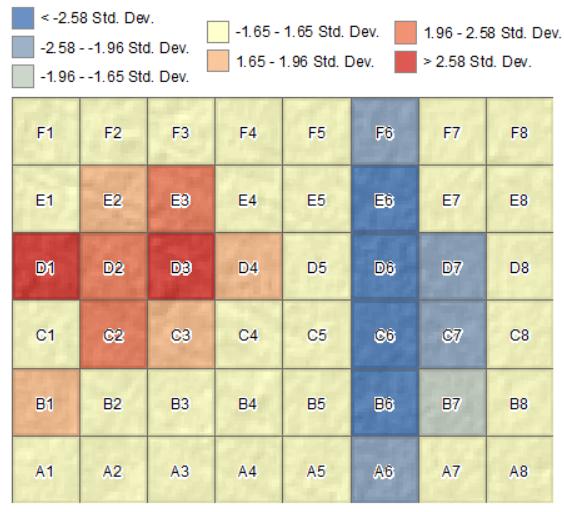
这张热点图证实,
靠近道路的鹿数量较少,
与平均值的偏差小于 -2 个标准差。
沼泽鹿在单元格 D2 附近更密集。
除了这两个低点和热点之外,
研究区似乎没有更多的空间格局。
- 为什么在这些热点地区会有这么多鹿?
- 造成这些热点的一些因素是什么?
我们可以利用回归分析来回答这些类型的问题,
使用空间回归来模拟沼泽鹿和土地特征之间的空间关系。
普通最小二乘(OLS)回归
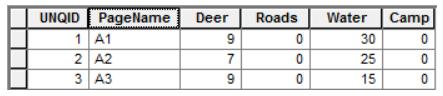
第一步是对每个网格单元格的自变量和因变量进行分组。
我们不能将沼泽鹿的位置视为点。
该表必须包含每个网格单元的鹿、露营地和湿地的数量。
下表是使用 OLS 预处理表的示例。
使用“空间关系建模”工具包中的“普通最小二乘回归”工具。
- 普通最小二乘回归模型:
- 输入要素类:具有聚合数据的网格单元
- 唯一ID:唯一ID字段(例如,1、2、3…)
- 输出要素类:输出的路径和名称
- 因变量:鹿的数量
- 解释变量:露营地、道路和水
- 输出报表文件:生成报告文件。
运行 OLS 工具后,
预测模型的残差将添加到显示中。
残差本质上是模型中的误差。
在继续之前,让我们仔细看看残差到底是什么。
如果查看单元格 A1(左下角),
在这个网格单元格中发现了 9 只鹿。
OLS 模型根据单元格中的树木、湿地、草地、道路和露营地的数量构建权重。
这些权重是 Beta 系数值。
当我们将权重代入回归公式时,
单元格 A1 中估计有 6.98 只鹿。
当从 9 中减去 6.98 时,
得到的余数为 2.01。
换言之,该模型将实际值低估了 2.01。
普通最小二乘回归残差值:
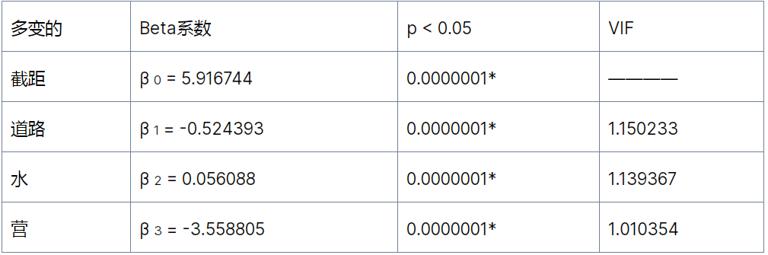
可以将露营地的低负 β 系数 (-3.56) 解释为沼泽鹿避开的区域。
道路也有负值 -0.52,
这意味着鹿不会选择这些网格。
沼泽鹿更喜欢湿地作为合适的栖息地。
这个模型证实了这个信念。
我们可以手动将 Beta 系数模型插入回归模型。
结果就是预测值。
在此示例中,
它是网格单元中鹿的预测数量。
Y = β0 +(β1 × x1)+(β2 × x2)+…+(βn × xn)+Ε
A1=5.916744+(-0.524393×0)+(0.056088×30)+(-3.558805×0)
A1=7.59
此 OLS 模型的调整 R 平方值为 0.795。
即可以解释 79.5% 的变化。
方差膨胀因子 (VIF):
另一个有趣的统计数据是方差膨胀因子 (VIF)。
如果 VIF > 7.5,
则表明解释变量之间存在冗余。
我们的 HSI 模型满足了这些标准,
VIF < 2.0。
概率和稳健概率:
星号 (*) 表示该系数具有统计显着性 (p < 0.05)。
沼泽鹿 HSI 的 p 值 < 0.0001,
这意味着系数具有统计显着性。
Jarque-Bera统计:
当此检验具有统计显着性 (p < 0.05) 时,
模型预测有偏差(残差不呈正态分布)。
Jarque-Bera 统计分数为 0.721。
当 OLS 回归模型工具在报告末尾给出警告 000851 时,
这意味着应处理空间自相关 (Moran's I) 工具以确保残差不在空间上自相关。
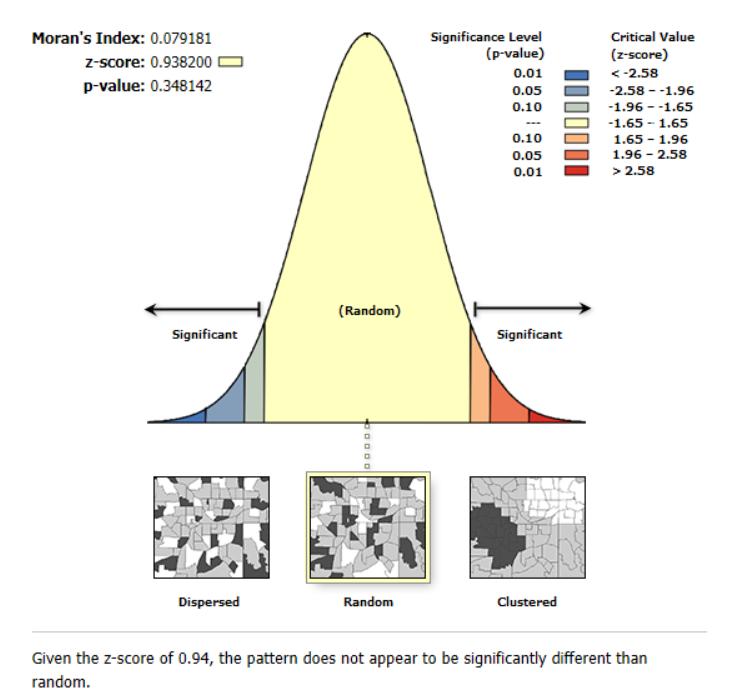
Moran's I 空间自相关
空间自相关将告诉我们低、高预测是否是随机的。
没有模型可以完美地预测,
并且总是会高估和低估。
空间自相关调查 OLS 模型是否随机分布。
- Moran's I 空间自相关:
- 输入要素类:OLS 输出
- 输入字段:标准残差(StdResid)
- 生成报告:是
当单击 “确定” 时,
该工具将生成报告。
双击报告,
并确保结果是随机的。
总结
我们利用空间回归工具在沼泽鹿、露营地、道路和湿地之间建立了空间关系。
回归工具研究了这些因素之间的关系并为每个变量生成权重。
这些权重被代入回归公式以计算和预测鹿的数量。
方差膨胀因子、z 分数、Jarque-Bera 和 Moran's I 确保了空间回归模型的稳健性和统计显着性。
回归模型显示沼泽鹿如何选择湿地作为合适的栖息地。
它还表明沼泽鹿倾向于避开露营地和道路。
这对土地资源管理者很有用,
可以限制露营地和道路的开发以保护此类鹿,
回归模型还可以预测其他地区的沼泽鹿。
本文链接 :如何在 ArcGIS 中构建空间回归模型